


AIKON Article Details | AIKON
PID Parameter Tuning Practice: The Art of Tuning from Oscillatory Curves to Stable Output
2025-03-21 17:02:27
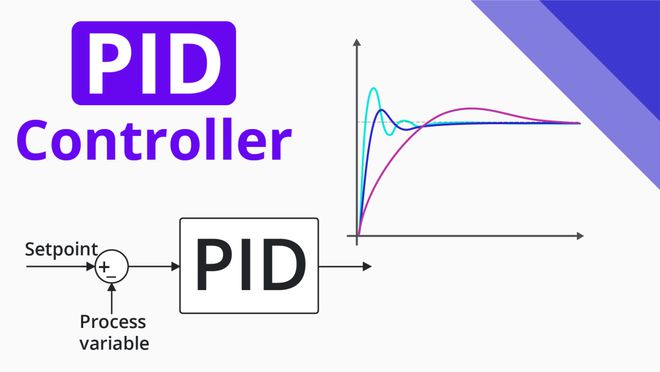
In the field of automatic control, the PID controller is like a highly - skilled craftsman, meticulously carving the performance of the system. The tuning of PID parameters is a crucial part of it, which directly determines whether the system can move from a troublesome oscillating state to a stable and efficient output. Today, let's dive into practice and explore the art of tuning from oscillation curves to stable outputs.
I. Understanding Oscillation Curves
When the PID parameters are not set properly, the system often oscillates. The oscillation curve is like a "distress signal" sent by the system, which shows the current unstable state of the system in a fluctuating form. These oscillations may be periodic or irregular. By carefully observing the characteristics such as the amplitude and frequency of the oscillation curve, we can initially determine the problems with the PID parameters. For example, a too - large amplitude may mean that the proportional coefficient (P) is set too high; a fast oscillation frequency may be related to the unreasonable setting of the integral time (I) or the derivative time (D).
II. Basics of PID Parameter Tuning
1. Proportional (P) Parameter
The proportional parameter is the foundation of the PID controller. It outputs the control quantity proportionally according to the current error size. Increasing the proportional coefficient can speed up the response of the system, but if it is set too large, it will cause system overshoot or even oscillation. When faced with an oscillation curve, we can try to appropriately reduce the proportional coefficient and observe the change of the curve. For example, for a curve with a large original oscillation amplitude, the oscillation amplitude may decrease after reducing the proportional coefficient.
2. Integral (I) Parameter
The function of the integral parameter is to eliminate the steady - state error of the system. However, if the integral time is set too short and the integral action is too strong, it will also cause system oscillation. When it is observed that the oscillation curve has a continuous deviation and cannot stabilize near the set value, we can consider appropriately increasing the integral time. This can make the integral action smoother and reduce the disturbance to the system.
3. Derivative (D) Parameter
The derivative parameter can predict the change trend of the error and give the control quantity in advance. But the derivative action is more sensitive to noise. If the derivative time is not set properly, it may also lead to system oscillation. When the oscillation curve shows high - frequency jitter, it may be necessary to reduce the derivative time.
III. Analysis of Practical Cases
Take a temperature control system as an example. In the initial state, the PID parameters are not set reasonably, and the control curve of the system temperature shows violent oscillations, seriously affecting the stability of the production process.
We first start with the proportional parameter and gradually reduce the proportional coefficient. After several adjustments, the amplitude of the oscillation decreases, but the response speed of the system becomes slower. Then, we start to adjust the integral parameter and appropriately increase the integral time. We find that the system can gradually tend to be stable, but there are still some small - amplitude fluctuations. Finally, we fine - tune the derivative parameter and adjust the derivative time carefully according to the change of the curve. After several rounds of adjustment and testing, the temperature control curve of the system finally becomes smooth and stable, achieving the expected control effect.
IV. Precautions in Tuning
Step - by - step: When adjusting the PID parameters, the adjustment range each time should not be too large. We should gradually observe the response change of the system. Otherwise, it may cause the system state to become worse.
Consider System Characteristics: Different systems have different dynamic characteristics. When tuning the PID parameters, we should fully consider factors such as the inertia and hysteresis of the system. For example, for a large - inertia system, the adjustment of the integral time and the derivative time needs to be more cautious.
Combine Theory and Practice: Although there are certain theoretical methods for PID parameter tuning, in actual operation, adjustments also need to be made in combination with the actual on - site situation. Only through continuous practice and summary can we find the most suitable PID parameters for the system.
PID parameter tuning is an art that requires patience and skills. Discovering problems from the oscillation curve and achieving stable system output through reasonable adjustment of PID parameters is not only a test of control technology, but also the key to improving system performance and ensuring stable production operation. It is hoped that through today's sharing, it can provide some useful references and help for everyone in the practice of PID parameter tuning.